Robot-Assisted Minimally Invasive Surgery (RAMIS) enhances surgeon dexterity and precision, with newer
platforms leveraging haptic feedback to further improve performance. Such force information has broader
potential to inform performance assessment, tactile localization, and surgical autonomy. This motivates
the need for accessible approaches to integrating force sensing into RAMIS tools more broadly, to
facilitate research and development of these next-generation capabilities.
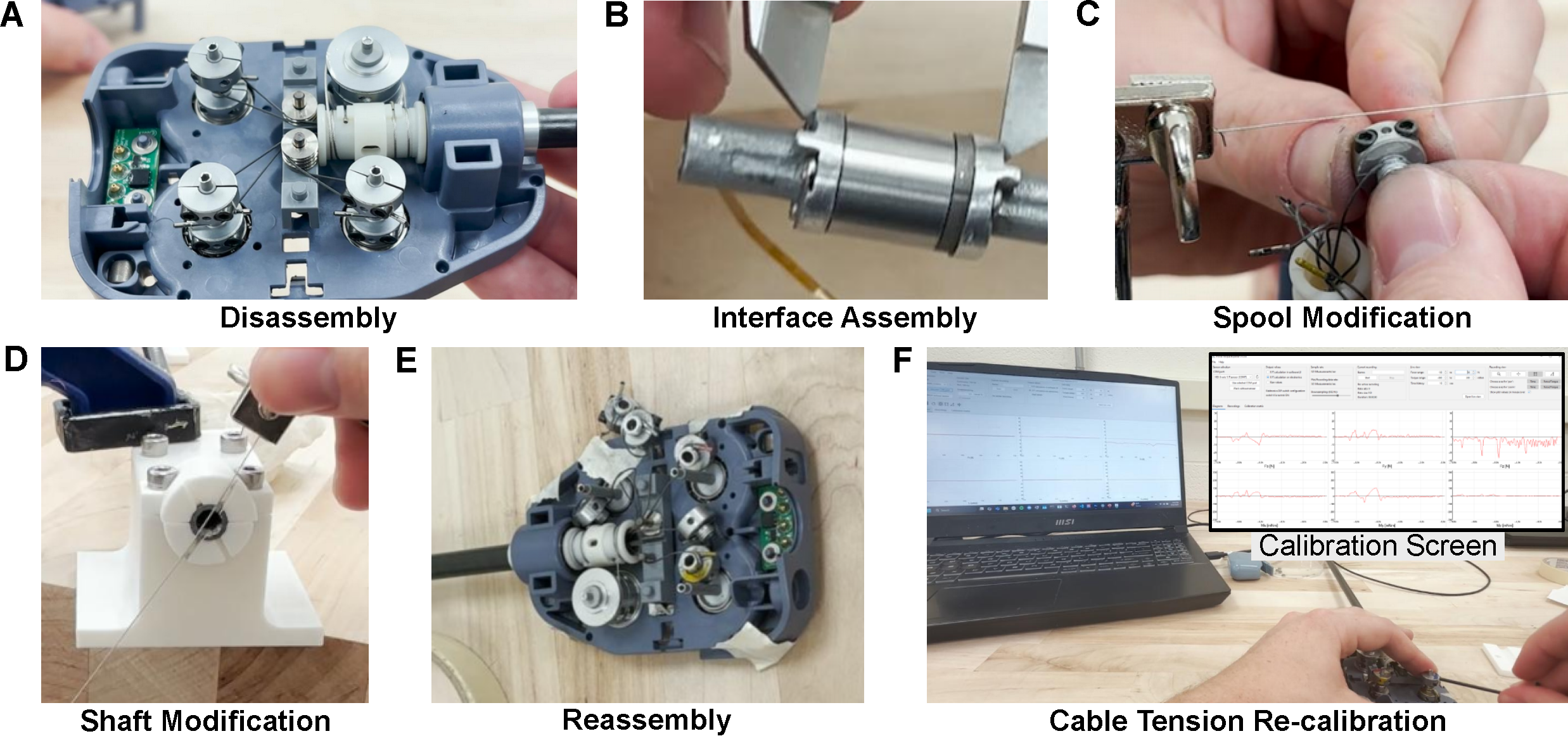
This work presents a method for integrating a six-axis commercial force sensor into the distal end of a
standard cable-driven surgical instrument, enabling end-effector force measurement while preserving the
original mechanical functionality of the device. The proposed design emphasizes reproducibility and
accessibility for research applications, requiring no specialized manufacturing tools.
In addition, a transformer neural network integrates force sensor measurements with robot state
information to aid estimation of applied forces at the end-effector, compensating for internal cable
forces arising from actuation. On average, our shaft-integrated approach achieves <4% error, surpassing
similar distal approaches, and is comparable to existing proximal approaches. This balance of system
integrability and performance thus enables applications and research into timely topics of haptic
feedback, skill assessment, and force-informed autonomy in RAMIS, offering a versatile platform for
advancing the development and evaluation of intelligent surgical systems.