Open Source Force Sensors for Minimally Invasive Surgical Robotics Research
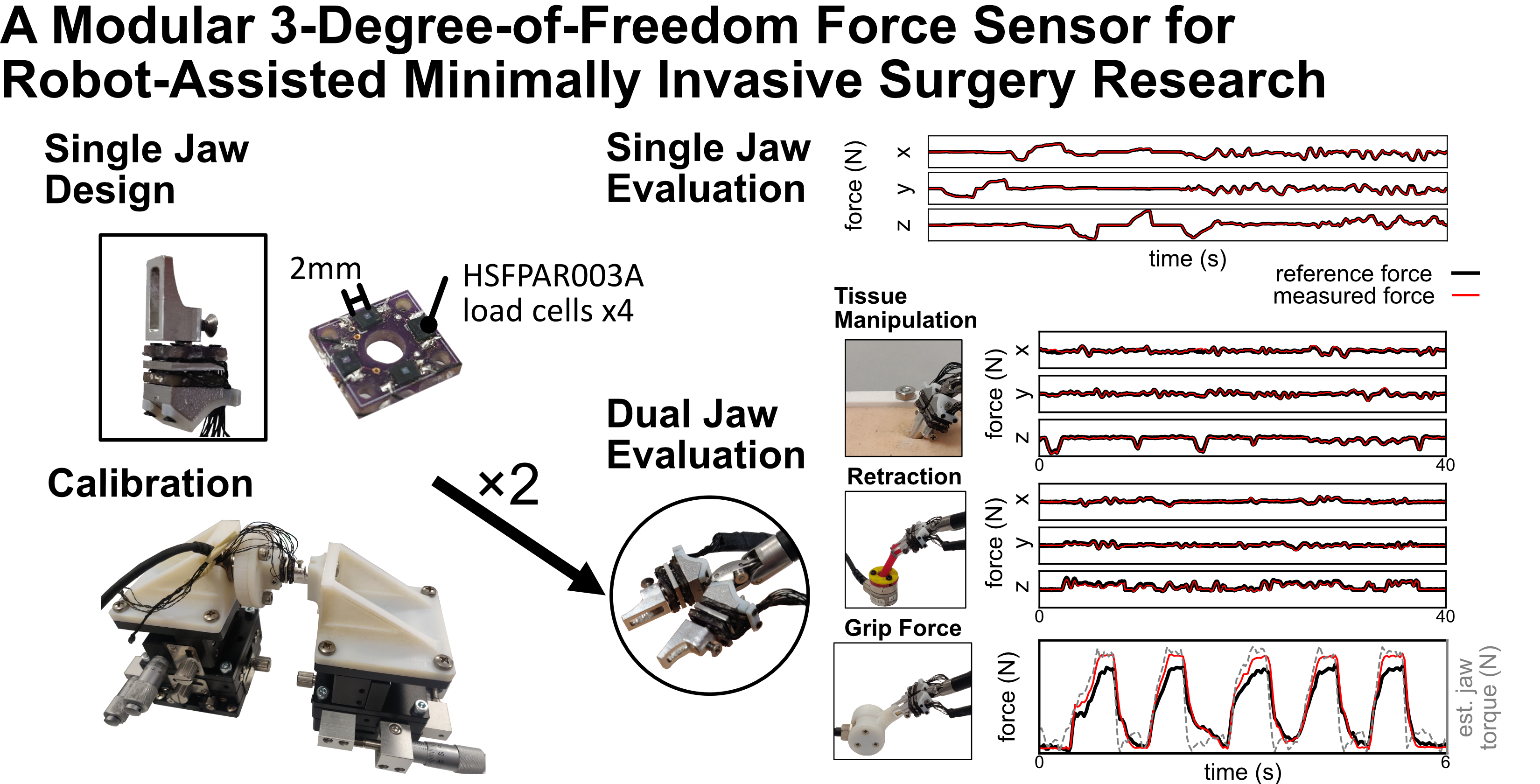
Research into haptic feedback, data-driven indirect force sensing approaches, and surgical skill evaluation require accurate knowledge of tool-tissue interaction forces. However, such measurement tools are not available commercially, and are difficult to realize without specialized knowledge. Our group develops sensor designs that strike a balance between ease-of-manufacture, cost, size and accuracy, to help researchers achieve their vision, thereby helping to advance our field. Our force sensors use an array of miniature commercially available load cells to sense forces applied to the forcep jaws. The interface to different forcep jaws are compatible with different jaw geometries making the system customizable to different surgical applications. The range of the for sensor is 5N in axial compression, and tension and 3N in the positive and negative lateral directions.
Primary Researcher: Xiangru Li We have release the designs for the force sensor here.