Research
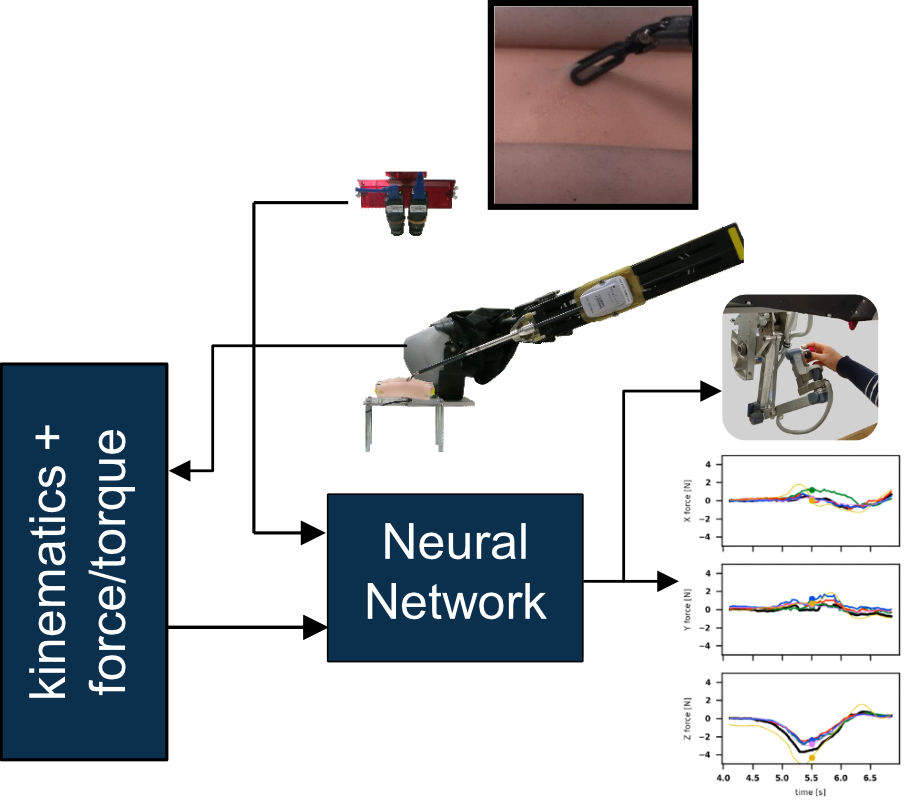
Vision-based Force Estimation and Haptic Feedback using Neural Networks
Primary Researcher: Shuyuan Yang
We also performed a gradient class activation to understand what visual features were being used by the neural networs to estimate force. Here we see from left to right that in the x-, y-, and z-directions, the neural networks are looking at the shadows and deformation of the silicone material. 
We have posted part of the dataset from [1] online. This can be access via our github repo page here.
Published Works
S. Yang, M. H. Le, K. R. Golobish, J. C. Beaver, and Z. Chua, “Vision-Based Force Estimation for Minimally Invasive Telesurgery Through Contact Detection and Local Stiffness Models,” Journal of Medical Robotics Research, p. 2440008, 2024.
Z. Chua and A. M. Okamura, “Characterization of Real-time Haptic Feedback from Multimodal Neural Network-based Force Estimates during Teleoperation,” in IEEE/RSJ International Conference on Intelligent Robots and Systems, 2022.
Z. Chua, A. M. Jarc, and A. M. Okamura, “Toward Force Estimation in Robot-Assisted Surgery using Deep Learning with Vision and Robot State,” in IEEE International Conference on Robotics and Automation, 2021, pp. 12335–12341.